IGIKORESHO CY'AMASHANYARAZI CYA HITBOT – Z-ECG-20 Igikoresho cy'amashanyarazi gifite intoki eshatu



Icyiciro cy'ingenzi
Ukuboko kwa roboti y'inganda / Ukuboko kwa roboti ikorana / Igikoresho cy'amashanyarazi / Igikoresho cy'ubwenge / Ibisubizo by'imashini zikora
Porogaramu

Ikiranga

·Gutahura igitonyanga cya clamp, imikorere y'agace gasohokamo
·Imbaraga, aho uherereye, umuvuduko ugenzurwa, igenzura ryimbitse binyuze muri Modbus
·Igikoresho cyo gufata intoki eshatu hagati
·Igenzura ryubatswemo: igice gito cy'ikirenge, byoroshye gushyira hamwe
·Uburyo bwo kugenzura: 485 (Modbus RTU), I/O
Igikoresho cy'amashanyarazi gifite iminwa itatu cyoroshye gufata ku bintu bya silinda
Umusaruro wo hejuru
Imbaraga zo Gufunga: 30-80N,
Ingufu nyinshi
Igitero kinini
Igipimo cyose: 20mm (gishobora guhindurwa)
Kugenzura neza
Kugenzurwa na Modbus
Umugenzuzi wubatswemo
Uduce duto dutwikiriye, tworoshye gushyira hamwe.
Ikora neza kandi vuba
Gusubiramo: ± 0.03mm,
Igitutu kimwe: 0.5s
Igikoresho cyo gufata amatako 3
Imyanya itatu yo gufunga, ikwiriye ibihe bitandukanye



Ibipimo by'ibipimo
| Nomero y'icyitegererezo Z-ECG-20 | Ibipimo |
| Igiteranyo indwara yo gucika kw'imitsi | 20mm (Ishobora guhindurwa) |
| Imbaraga zo gufata | 30-80N (Ishobora guhindurwa) |
| Gusubiramo | ± 0.03mm |
| Uburemere bwo gufata busabwa | Ibiro ntarengwa 1 |
| Kohereza uburyo | Raki na Pinion + Gari ya moshi iyobora umupira |
| Gushyira amavuta mu bice byimuka | Buri mezi atandatu cyangwa miliyoni imwe y'ingendo / igihe |
| Igihe cyo kugenda kw'inzira imwe | Amasegonda 0.5 |
| Ingano y'ubushyuhe bwo gukora | 5-55℃ |
| Ingano y'ubushuhe mu mikorere | RH35-80(cyangwa seNta bukonje) |
| Igihe gito cyane cyo gusinzira inshuro imwe | Amasegonda 0.5 |
| Kurwanya indwara ya stroke | Ishobora guhindurwa |
| Guhindura imbaraga zo gufunga | Ishobora guhindurwa |
| Uburemere | 1.5kg |
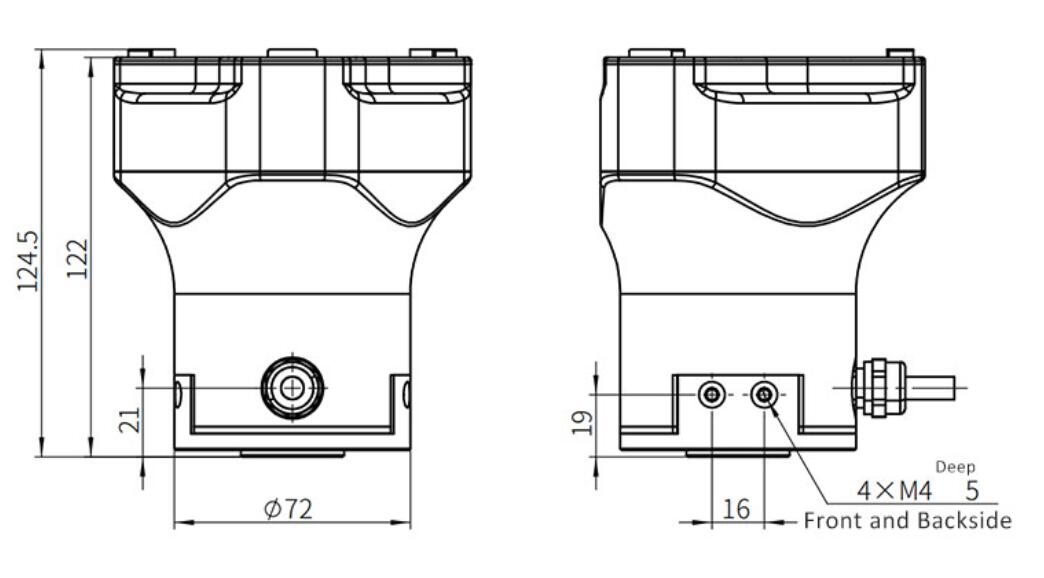
| Ingano(cyangwa seL*W*H) | 114*124.5*114mm |
| Impamyabumenyi ya IP | IP54 |
| Ubwoko bwa moteri | Servo Moteri |
| Umugezi w'agahenge | 2A |
| Voltage ifite amanota | 24V ± 10% |
| Umuriro uhagaze | 0.8A |
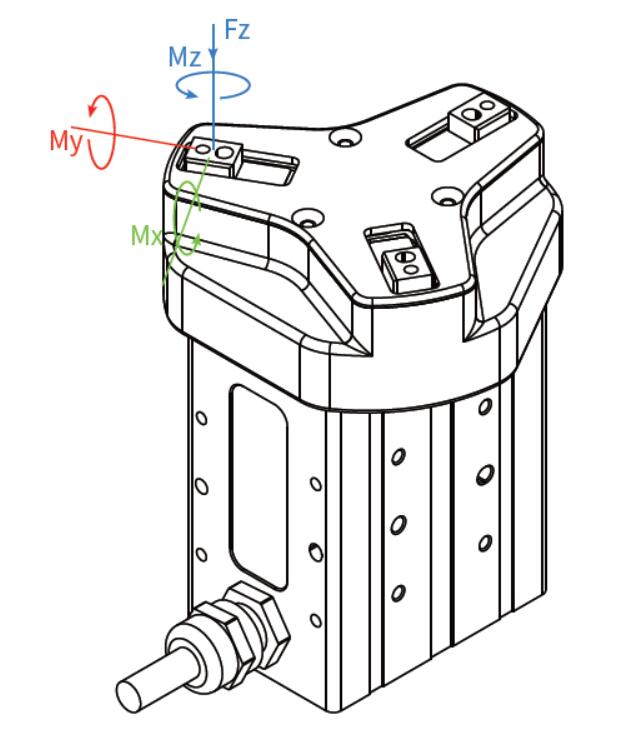
| Umutwaro uhoraho wemewe mu cyerekezo gihagaze | |
| Fz: | 150N |
| Torque yemewe | |
| Mx: | 1.5 Nm |
| Ibyanjye: | 1.5 Nm |
| Mz: | 1.5 Nm |
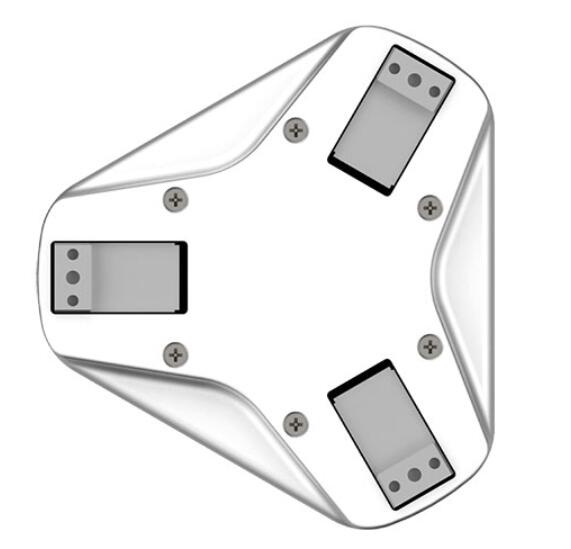
Uburyo bwo gushyiramo neza, gukoresha intoki eshatu
Ibikoresho by'amashanyarazi bifite iminwa itatu bifite ubushobozi bwo gusubiramo bwa ± 0.03mm, kugira ngo bikoreshe uburyo bwo gufunga iminwa itatu, bifite akazi ko gupima amadomo, gutanga umusaruro mu gice, bishobora kuba byiza kurushaho mu gihe cyo gufunga ibintu bya silindiri.

Ifite ikoranabuhanga ryihariye, rihuza neza
Uburyo bwo gukanda bushobora guhindurwamo 20mm, imbaraga zo gukanda zishobora guhindurwamo 30-80N, ni ugukoresha uburyo bwo kohereza ubutumwa bwa Gear rack + ball guide rail, ni igikoresho cyo kugenzura, imbaraga zo gukanda n'umuvuduko birashobora kugenzurwa.
Ingano nto, ishobora gushyirwaho neza

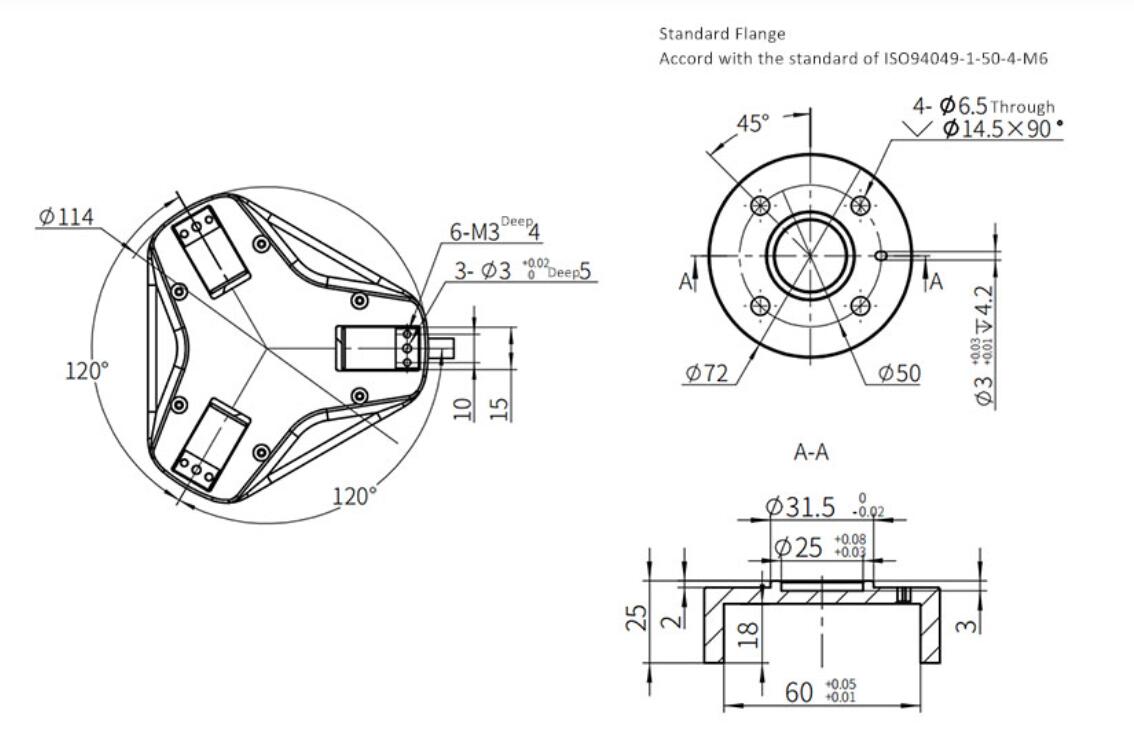
Ingano ya Z-ECG-20 ni L114*W124.5*H114mm, uburemere ni 0.65kg gusa, ni ntoya, ishyigikira ubwoko bwinshi bw'ibikoresho byo kuyishyiraho, byoroshye gukorana n'imirimo itandukanye yo kuyihambira.


Gusubiza vuba, kugenzura neza imbaraga

Igikoresho gikoresha amashanyarazi gifite akazi ko gupima no gupima aho gitemba no gusohora igice, uburemere bwacyo ni 1.5kg, amazi ntarengwa ni IP20, uburemere bwo gufunga busabwa ni ≤1kg, gishobora gukora neza cyane mu gufunga.
Uburyo bwo kugenzura bwinshi, bworoshye gukoresha

Igikoresho cy'amashanyarazi cya Z-ECG-20 gishobora kugenzurwa neza na Modbus, imiterere yacyo yoroshye, kugira ngo ukoreshe protocole ya Digital I/O, ukeneye gusa insinga imwe kugira ngo uyihuze/uzime, kandi ikorana na sisitemu nkuru ya PLC.

Ahantu ho gushyira imizigo mu gihe cy'uburemere bw'ingufu
Ubucuruzi bwacu


Ibyiciro by'ibicuruzwa
-

URWEGO RW'IBIKORESHO BYA GRIPPER – FPT Ibitoki bitatu...
-

HITBOT ELECTRIC GRIPPER SERIES - Z-EFG-20 Paral ...
-

DH ROBOTICS SERVO ELECTRIC GRIPER PGE SERIES –...
-

URWEGO RW'IBIKORESHO BY'AMASHANYARAZI BYA HITBOT – Z-EFG-40...
-

DH ROBOTICS SERVO ELECTRIC GRIPER PGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPER CG SERIES – ...