IGITERI CY'AMASHANYARAZI CYA HITBOT – Z-EFG-C35 Ikoranabuhanga Rikoresha Amashanyarazi




Icyiciro cy'ingenzi
Ukuboko kwa roboti y'inganda / Ukuboko kwa roboti ikorana / Igikoresho cy'amashanyarazi / Igikoresho cy'ubwenge / Ibisubizo by'imashini zikora
Porogaramu
Udukoresho twa robo twa SCIC Z-EFG duto dufite sisitemu ya servo yubatswemo, ituma bishoboka kugenzura neza umuvuduko, aho uherereye, n'imbaraga zo gufunga. Sisitemu ya SCIC yo gufata ibikoresho byikora izagufasha gufungura amahirwe mashya yo gukora imirimo wishakiye utarigeze utekereza ko ishoboka.

Ikiranga

·Gutahura igitonyanga cya Gripper, imikorere y'agace gasohokamo
·Ingufu, aho umuntu ari n'umuvuduko bishobora kugenzurwa neza binyuze muri Modbus
·Kuramba: miliyoni nyinshi z'ingendo, zirenze inzara z'umwuka
· Igenzura ryubatswemo: igice gito cy'ikirenge, byoroshye gushyira hamwe
·Uburyo bwo kugenzura: 485 (Modbus RTU), I/O
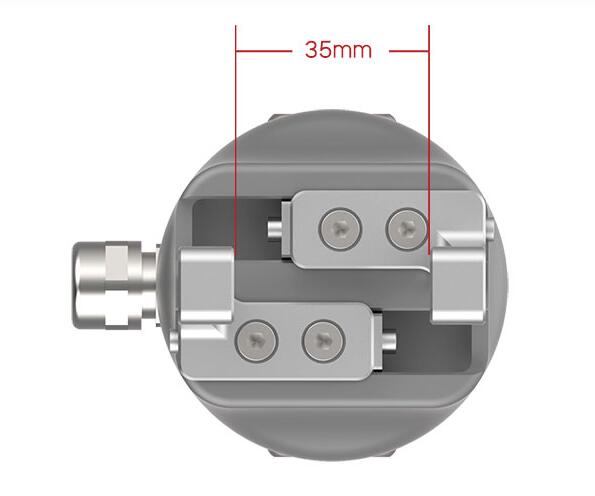
Stroke ni 35mm, Clamping Force ni 50N. Irahuye na Robot Arm ifite 6-Axis.
Inshuro nyinshi
Igihe gito cyo gukubita ni 0.5s
Ubuhanga bwo hejuru
Gusubiramo ni ± 0.03mm
Umushahara mwinshi
Uburemere bwo gufunga busabwa ≤1kg
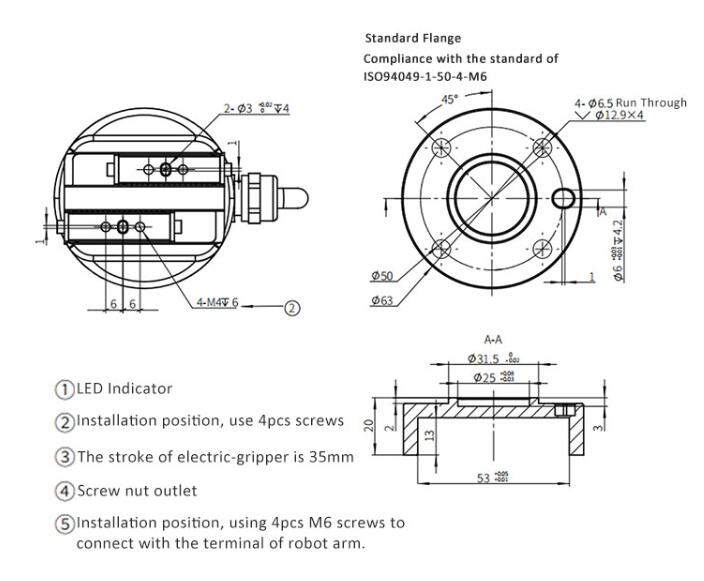
Shyiraho ushyireho akantu ko gukiniraho
Igikoresho gikoresha amashanyarazi cyane cyane robot ifite axis 6
Umurizo uhinduka
Inyuma yayo irahinduka kugira ngo ihuze n'ibikenewe bitandukanye
Gufunga byoroshye
Ishobora gufata ibintu byoroshye kandi bifite ubumuga

● Guteza imbere impinduramatwara mu gusimbuza ibikoresho byo mu bwoko bwa pneumatic grippers hakoreshejwe amashanyarazi, ibikoresho bya mbere byo mu bwoko bwa grippers by'amashanyarazi bifite sisitemu ya servo ihuriweho mu Bushinwa.
● Gusimbuza neza compressor y'umwuka + filter + solenoid valve + throttle valve + pneumatic gripper
● Igihe cyo gukora ingendo nyinshi, gihuye n'igihe cy'ubusilinda gakondo bw'Abayapani



Ibipimo by'ibipimo
| Nomero y'icyitegererezo Z-EFG-C35 | Ibipimo |
| Igitero cyose cy'imitsi | Ingano ya 35mm ishobora guhindurwa |
| Imbaraga zo gufata | 15-50N ishobora guhindurwa |
| Gusubiramo | ± 0.03mm |
| Uburemere bwo gufata busabwa | ≤1kg |
| Uburyo bwo kohereza | Agasanduku k'ibikoresho + Ubuyobozi bw'umubumbe |
| Gushyira amavuta mu bice byimuka | Buri mezi atandatu cyangwa miliyoni imwe y'ingendo / igihe |
| Igihe cyo kugenda kw'inzira imwe | Amasegonda 0.5 |
| Uburyo bwo kugenda | Intoki ebyiri zigenda zitambitse |
| Uburemere | 0.5kg |
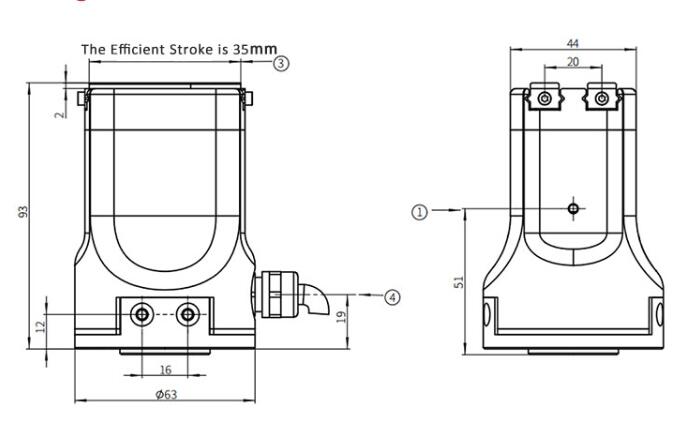
| Ingano (L*W*H) | 63*63*95mm |
| Ingufu zo gukora | 24V±10% |
| Igipimo cy'amashanyarazi | 0.3A |
| Umuvuduko w'amazi uri hejuru cyane | 1A |
| Ingufu | 8W |
| Icyiciro cy'uburinzi | IP20 |
| Ubwoko bwa moteri | DC idakoresha uburoso |
| Ingano y'ubushyuhe bwo gukora | 5-55℃ |
| Ingano y'ubushuhe mu mikorere | RH35-80 (Nta bukonje) |

| Umutwaro uhoraho wemewe mu cyerekezo gihagaze | |
| Fz: | 150N |
| Torque yemewe | |
| Mx: | 2.5 Nm |
| Ibyanjye: | 2 Nm |
| Mz: | 3 Nm |
Imbere mu gutwara no kugenzura imodoka
Imashini ikoresha amashanyarazi ya Z-EFG-C35 ifite sisitemu ya servo imbere, imbaraga zayo zose ni 35mm, imbaraga zo gufunga ni 15-50N, imbaraga zayo zo gufunga no gufunga zirahindurwa, kandi ubushobozi bwo gusubiramo ni ± 0.03mm.

Ihuye na Six-Axis Robot Arm

Iyi porogaramu ijyanye n'ukuboko kwa roboti ifite umurongo wa 6, kugira ngo ikoreshwe, igihe gito cyo gukanda ni 0.5s gusa, kugira ngo ihuze n'ibisabwa byihuse kandi bihamye byo gufunga umurongo ukorerwaho.
Ingano nto, ishobora gushyirwaho neza

Ingano y'igicuruzwa cya Z-EFG-C35 ni L63*W63*H95mm gusa, ni nto, kandi ishobora gushyirwa ahantu hafunganye.


Uburyo bwo Gusubiza Byihuse, Ubunyangamugayo bwo Kugenzura Ingufu

Ubwoko bw'ingendo zayo ni IP20 y'intoki ebyiri, idapfa amazi, igice cyayo gishobora guhindurwa igihe icyo ari cyo cyose, abakiriya bashobora guhindura clamper hakurikijwe ibisabwa mu gukora.
Uburyo bwo kugenzura bwinshi, bworoshye gukoresha

Imiterere ya Z-EFG-C35 ni uburyo bworoshye kandi bwinshi bwo kugenzura, harimo 485 (Modbus RTU), Pulse, I/O, kandi ijyanye na sisitemu y'ibanze ya PLC.

Ahantu ho gushyira imizigo mu gihe cy'uburemere bw'ingufu
Ubucuruzi bwacu


Ibyiciro by'ibicuruzwa
-

DH ROBOTICS SERVO ELECTRIC GRIPER PGE SERIES –...
-
-300x2551-300x300.png)
DH ROBOTICS SERVO ELECTRIC GRIPER PGSE SERIES ...
-

DH ROBOTICS SERVO ELECTRIC GRIPER CG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPER PGE SERIES –...
-

URWEGO RW'IBIKORESHO BY'AMASHANYARAZI BYA HITBOT – Z-EFG-13...
-

DH ROBOTICS SERVO ELECTRIC GRIPER CG SERIES – ...